
CAN (canbus)
Note:
This CAN API is supported only on Gen 2 devices (Photon, P1, Electron, and E-Series).
The Tracker SoM supports CAN, but uses an external library. See Tracker CAN.
The Argon, Boron, B-Series SoM, P2, and Photon 2 do not include CAN hardware, but it can be added with an external CAN interface chip and library, like the Tracker SoM.
Since 0.4.9:
Controller area network (CAN bus) is a bus used in most automobiles, as well as some industrial equipment, for communication between different microcontrollers.
The Photon and Electron support communicating with CAN devices via the CAN bus.
- The Photon and Electron have a CANbus on pins D1 (CAN2_TX) and D2 (CAN2_RX).
- The Electron only, has a second CANbus on pins C4 (CAN1_TX) and C5 (CAN1_RX).
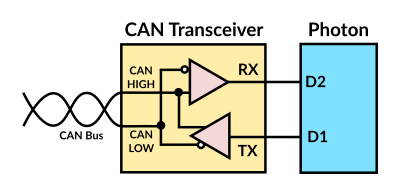
Note: an additional CAN transceiver integrated circuit is needed to convert the logic-level voltages of the Photon or Electron to the voltage levels of the CAN bus.
On the Photon or Electron, connect pin D1 to the TX pin of the CAN transceiver and pin D2 to the RX pin.
On the Electron only, connect pin C4 to the TX pin of the CAN transceiver and pin C5 to the RX pin.
// EXAMPLE USAGE on pins D1 & D2
CANChannel can(CAN_D1_D2);
void setup() {
can.begin(125000); // pick the baud rate for your network
// accept one message. If no filter added by user then accept all messages
can.addFilter(0x100, 0x7FF);
}
void loop() {
CANMessage message;
message.id = 0x100;
can.transmit(message);
delay(10);
if(can.receive(message)) {
// message received
}
}