
Store and forward
Store and Forward is a feature of Tracker Edge and Monitor Edge software to store location events to the local filesystem when the device is unable to publish due to poor or non-existent cellular signal.
The events are stored on the flash file system of the device, and you can configure the size and other parameters about how events are saved, and discarded when there isn't sufficient space.
This feature is available in Tracker Edge v18 and Monitor Edge v1 and later.
Console configuration
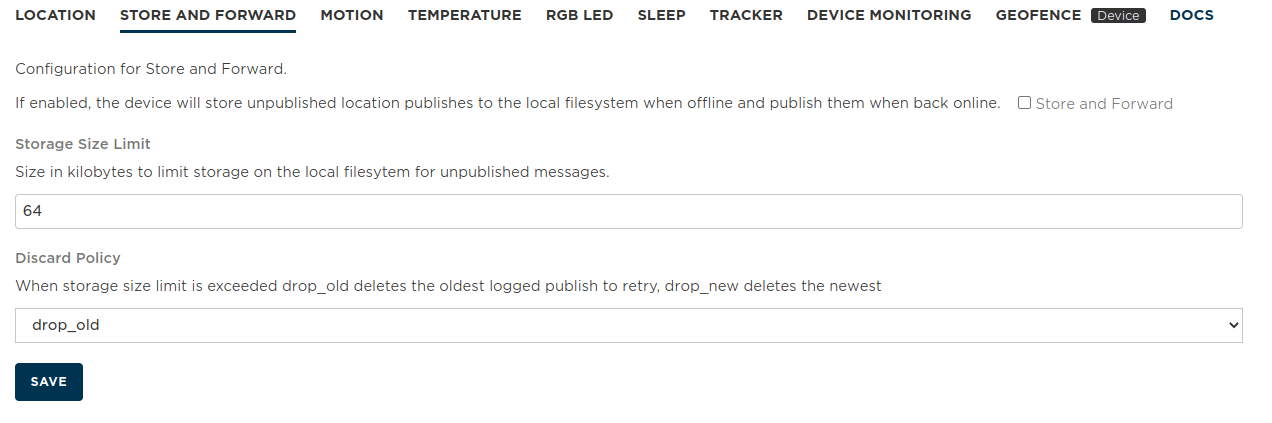
The configuration is available in the fleet settings in the Particle console.
When disabled, location publishes that occur when the device does not have cellular connectivity are discarded. This makes sense if you only want to know where the device is currently, not where it has been in the past.
Store and forward is enabled when the checkbox is checked.
Storage Size Limit in kilobytes. Default: 64K. While the flash file system is 4 MB, you should not use the entire file system for store and forward. Also, since publishes occur one per second when reconnecting, sending large amount of historical location data will use a lot of data operations and time.
Discard Policy is drop_old or drop_new which determines whether to discard the oldest or newest location data when the storage size reaches the limit.
The disk queue is implemented as first-in, first-out, FIFO. New items to store are pushed to the back of the queue while older items are popped from the front of the queue.
When drop_old is used, and the queue is at maximum size, a new entry is added to the back of queue and the oldest discarded,
When drop_new is used, and the queue is at maximum size, new entries are immediately discarded.
Each event in the queue is a single file on the LittleFS flash file system. The file system uses 4096 byte (4K) sectors, and the minimum size size is 2 sectors, one for data and one of the file metadata. Thus each event will take 8K of flash file system space, regardless of the size of the data in the event.
Edge firmware
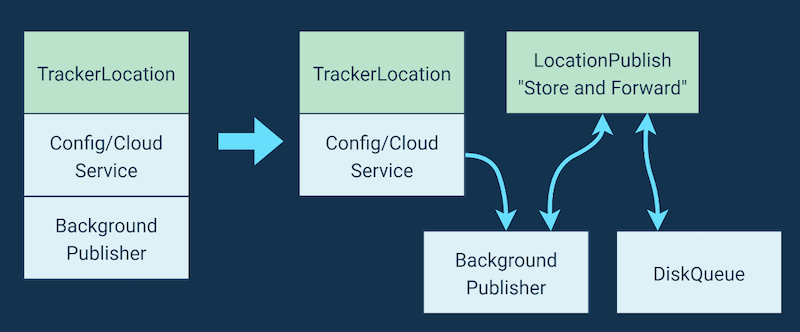
There are a number of classes that work together to implement the store and forward feature.
When using edge firmware, you should always use its built-in functionality instead of the underlying Device OS functionality when there is overlap. For example:
Don't use
Particle.publish()directly from your customizations to edge firmware. Doing so can exceed the rate limits for publishing messages when you do so at the same time that the disk queue for store and forward is being empty.Don't use
System.sleep()directly. Instead, use the edge sleep functions, otherwise the two will conflict and behave unpredictably.
Adding to the loc event
In many cases, you may want to just add to the loc event instead of publishing a separate event.
- Adding to the
locevent follows the settings for publish rate, store and forward, etc. - You are still limited to the maximum publish size (typically 1024 bytes), however, additional data like nearby Wi-Fi access points for Wi-Fi geolocation are added after your data, and limited to the available space. If your event is large, the access points with a weak signal could be omitted, for example.
- Adding to the
locevent does not add additional data operations. - The additional fields you add to
locare also saved with historical location information and are available when queried by the Particle Cloud API.
If you want to add to the loc event, see these documents:
- Adding to
locin Tracker Edge - Adding to
locin Monitor Edge
However, in some cases your data will be too large, or have a different cadence than the location publishes, in which case you can use the techniques below.
For a detailed description of the fields in the loc event, see asset tracking events in the cloud API reference.
Priority queues
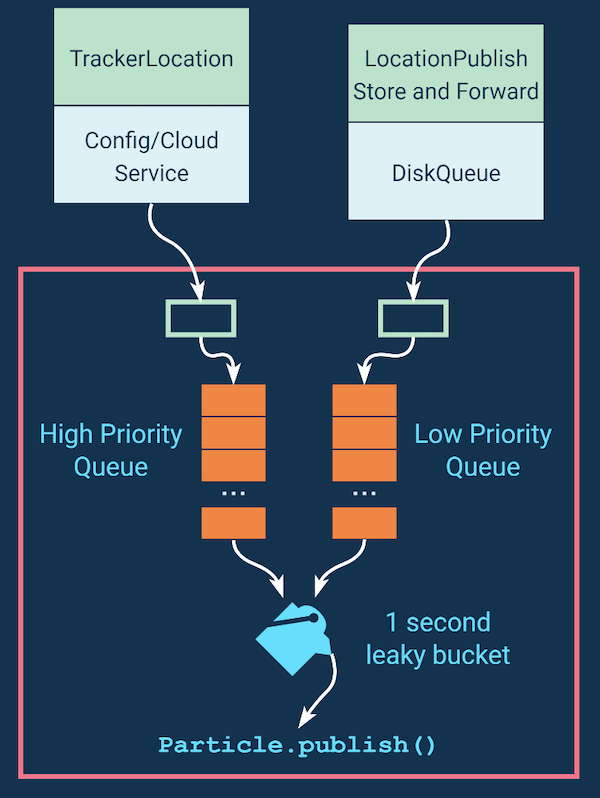
There are two priority queues:
- 0 (high priority) can be used to send out urgent, timely events
- 1 (normal priority) is used and is the default when using the helper library
For location publishes, it will initially attempt to use the high priority queue. If the device is offline, it will be added to the disk queue. When the disk queue is uploaded after coming back online, the loc events will be put into the normal priority queue.
It is possible to add additional priority queues by modifying the cloud_service.h file, but this is not generally necessary.
CloudService send
If you want to publish your own custom events that are not queued, but still mixed in with and rate-limited with store and forward events, use the CloudService in Tracker Edge and Monitor Edge.
- It does not block the calling thread; it will call a callback either on success or failure.
- It handles buffering events (in memory) to rate limit outgoing publishes.
- Up to 8 events will be buffered in RAM. Beyond that, the publish function returns false and the event is not queued.
- It handles two priority queues, managing rate limiting between Edge, DiskQueue, and your events.
- In cases of immediate failure (queue full, invalid parameters), the function will return and will not call the callback.
EdgeEventQueue Helper library
While you can use CloudService and DiskQueue directly, it's easier to use a helper library which encapsulates some of the complexity.
The EdgeEventQueue library makes it easy to implement both queued and non-queued publishes while maintaining compatibility with the rate-limiting built into the Edge software. It works with both Tracker Edge (v18 and later) and Monitor Edge firmware. The Github link includes additional information on setup options and the API.
Initialization example - helper
Add to setup() (Tracker Edge) or user_setup() (Monitor Edge):
privateEventQueue
.withSizeLimit(50 * 1024)
.withQueuePath("/usr/testq")
.setup();
Add to loop - helper
Add to loop() (Tracker Edge) or user_loop() (Monitor Edge):
privateEventQueue.loop();
Queued send - helper
This automatically handles:
- Queuing events to the flash file system
- Rate limiting publishes
- Managing high and normal priority event queues
// EXAMPLE
privateEventQueue.publish("eventQueueTest", eventData);
Non-queued send - helper
It also implements a helper function to making using CloudService send easier. You can use this even if you are not using the disk queue.
// PROTOTYPE - EdgeEventQueueRK
static int cloudServicePublish(const char *eventName, const char *eventData, PublishFlags publishFlags = {}, size_t priority = 0, std::function<int(CloudServiceStatus)> cb = 0);
eventNameThe event name, as is used inParticle.publish.eventDataThe event data, as is used inParticle.publish.publishFlagsPublish flags, as is used in Particle.publish. This is optional, and if omitted the default flags are used.priority0 or 1. 0 is the default queue and 1 is the low priority queue.cbCallback function to be called on successful completion or error. Optional. Not called if an immediate error results in a non-zero result code; callback is only called if the return value is 0.Returns
int0 on success or a non-zero error code
The callback function has this prototype:
int callback(CloudServiceStatus status)
statusisparticle::Error::NONE(0) or an system error code on error
Callback is a std::function so you can pass a lambda, which allows you to pass additional data via capture variables, or
call a C++ class method and instance easily.
The eventName and eventValue are copied and do not need to remain valid until the callback is called. Once the
cloudServicePublish call returns, the variables can go out of scope, so it's safe for them to be local variables
on the stack.
Using cloudServicePublish interleaves your event with others in the system in a queue in RAM. The queue is finite in size (currently 8 elements per priority queue) and if the queue is full, -EBUSY (-16) is returned.
Note that this function does not use the disk queue! It's a low-level function used by the publish method in this class, or you can use it for your own purposes if you want to publish events that are not saved to disk if the device is currently offline.